Wrzutnik monet - jest urządzeniem peryferyjnym i aby się komunikować z automatem musi użyć do tego jednego z 2 protokołów MDB lub EXE ( są też inne typu BDV czy DEX ale niszowe i stare ). Oba protokoły mają inny sposób porozumiewania się z automatem dlatego też posiadają inne przewody/wtyczki do połączeń z płytą główną CPU Necta
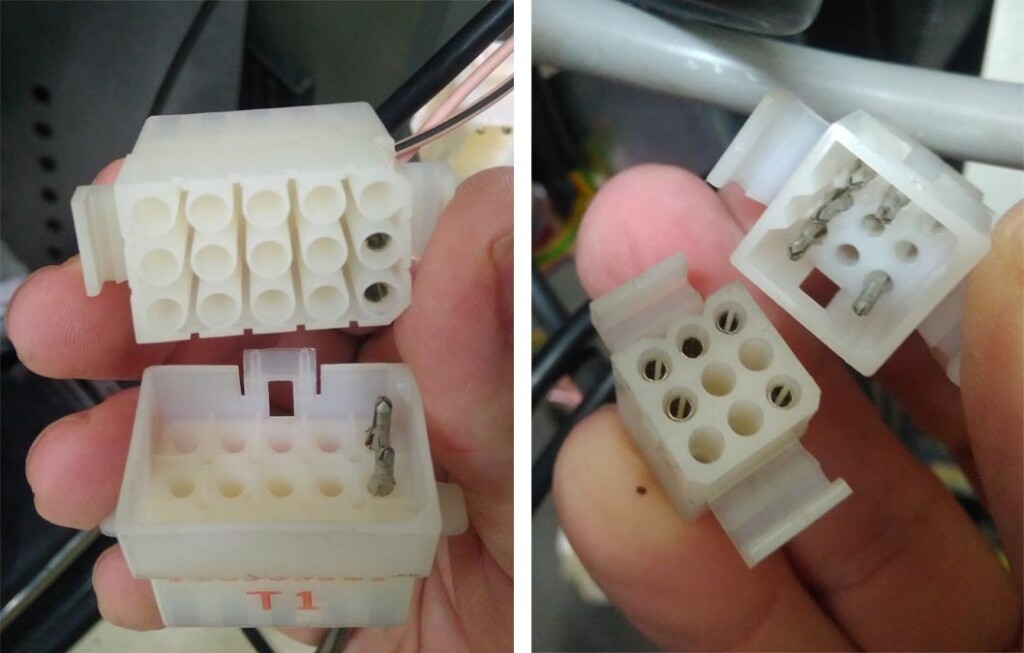
MDB – najnowszy bo tak trzeba go określić, jest to jedna małą wtyczka z wtyczką 6 pinową ( ale używanych jest 5 )
EXE – charakteryzuje się 2 wtyczkami, większa odpowiada za zasilanie, mniejsza służy do transmisji danych .
BDV – gniazdo na płytach Necta 252436 jest poprzez przejściówkę używane jako gniazdo EXE, natomiast wrzutniki monet już praktycznie nie występują z takim złączem.
DEX – rzadko obecnie spotykany protokół do przekazywania statystyk sprzedaży. Wymagane jest aby wrzutniki przekazywały dane w standardzie opracowanym przez EVA-DTS. Umożliwia to zautomatyzowanie dokonywania odczytów danych statystycznych począwszy przez drukarki, czytniki podczerwieni, pamięci typu USB a na telemetrii kończąc.
Wrzutniki podłączamy bezpośrednio do płyty :
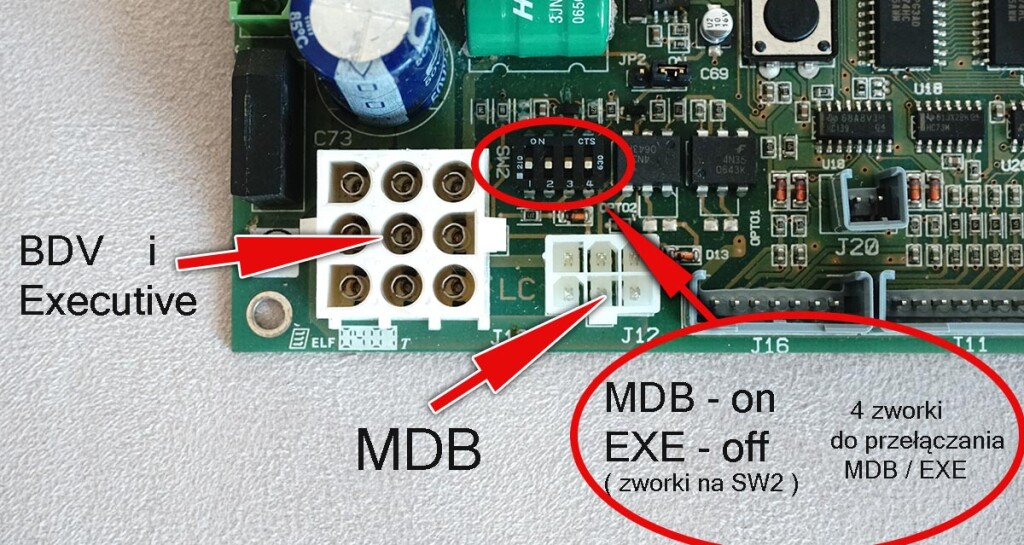
W przypadku płyt CPU Necta 252436 , poza podłączeniem do innej wtyczki musimy jeszcze zwrócić uwagę na 4 zworki ( SW2 ) : podłączając przez MDB muszą być przełączone na „ON” w stronę zielonego akumulatora, przy EXE wszystkie w przeciwną stronę.
MDB - podłączamy jedną wtyczką bezpośrednio do gniazda w płycie głównej, ten protokół przekazuje więcej informacji o sprzedaży, stanie monet, kwoty skierowanej do kasetki, itd. o czym napiszemy w >> audyt <<
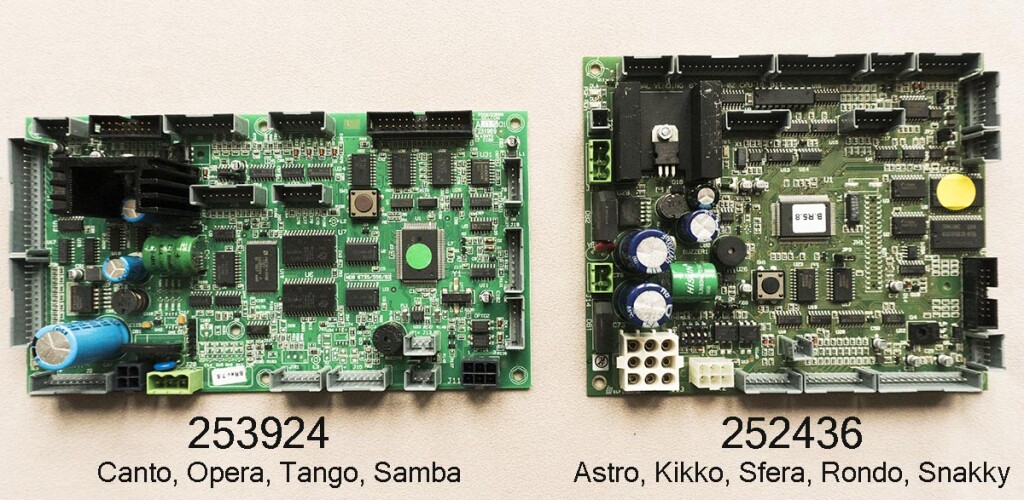
dużo nowych urządzeń ( po 2015 ) mają już tylko MDB i tak np automaty Necta z najnowszej linii : Samba, Tango, Canto, Opera itd. mają już tylko gniazdo MDB.
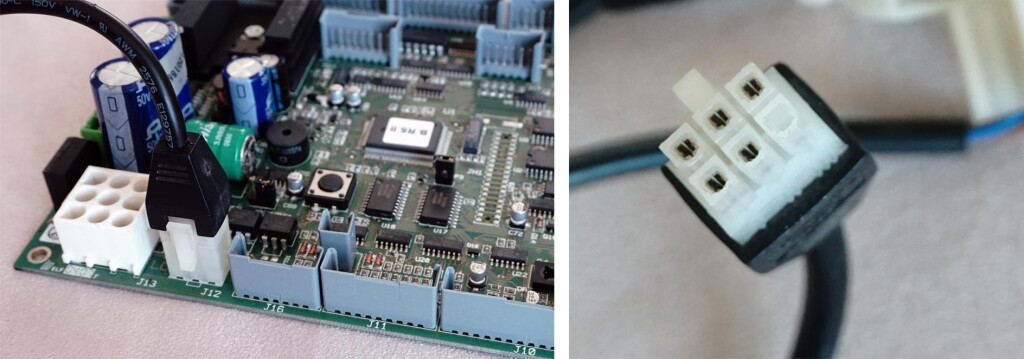
EXEcutive – ten protokół wymaga podpięcia wrzutnika monet do płyty głównej do gniazda BDV z oryginalnie przez Necta przygotowaną przejściówką, dlatego w tym wypadku wrzutnik podpinamy do wtyczki na przewodzie. Dodatkowo zasilanie wrzutnika jest zasilane z osobnej wtyczki ( większej z dwoma pinami ) w niektórych wersjach automatów ta duża wtyczka jest podpinana do takiego samego gniazda i trzeba je połączyć przy zmianie na MDB.